本文介绍Ceph中最为核心的、基于计算的对象寻址机制及其相关的概念解释。
寻址流程
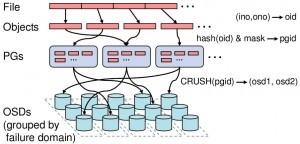
Ceph系统中的寻址流程如下图所示:
本图来源于Ceph论文 Ceph论文
论文对上图描述的寻址过程描述如下:
Files are striped across many objects, grouped into placement groups (PGs), and distributed to OSDs via CRUSH, a specialized replica placement function.
翻译成中文:
Step 1: 将需要保存的file切分成大小一致的一系列object
Step 2: 把objects组织到PGs里
Step 3: 最后通过CRUSH保存到OSD
对象映射
File到object的映射
(ino,ono)->oid
从上图可以看出,第一层映射是file到object的映射。
具体过程是将需要保存的file,转换为RADOS能够处理的object。类似RAID中的条带化过程,按照object的最大size对file进行切分,把file切分成一批大小一致的数据块object。
Object到PG的映射:
hash(oid) & mask -> pgid
在把file切分为一批object后,紧接着要做的是,需要把每个object独立地映射到一个PG中去。也就是得到每个object对应的PG。
计算方法: 首先计算object的Hash值并将结果和PG数目取余,以得到object对应的PG编号。
公式如下:
hash(oid) % PG Num -> pgid
Ceph中在对象和设备之间有两个概念,Pool和Placement Group(PG),每个对象要先计算对应的Pool,然后计算对应的PG,通过PG可得到该对象对应的多个副本的位置,三个副本中第一个是Primary,
其余被称为replcia。
假设一个对象image,其所在的pool是glance,计算device的方式如下:
- 计算image的hash值得到0x3F4AE6E3
- 计算glance的pool id得到3
- pool glance中的PG数量为256,0x3F4AE6E3 mod 256 = 23,所以PG的id为3.23
| OBJECT | MAPPING VALUE | PG MAPPED TO |
|---|---|---|
| Object 1 | hash(Object 1) = 0x3F4AE6E3 | 0x3F4AE6E3 mod 256 = 23 |
PG到OSD的映射
CRUSH(pgid) -> (osd1,osd2,osd3)
最后一步是通过CRUSH算法将PG映射到一组OSD中。最终结果是file切分的object就会存放在在这一组OSD中。
CRUSH算法的目的是,为给定的PG分配一组存储数据的OSD节点。
CRUSH算法通过每个设备的权重来计算数据对象的分布。对象分布是由cluster map和data distribution policy决定的。
-
Cluster map描述了可用存储资源和层级结构(比如有多少个机架,每个机架上有多少个服务器,每个服务器上有多少个磁盘)。
-
Data distribution policy由placement rules组成。rule决定了每个数据对象有多少个副本,这些副本存储的限制条件(比如3个副本放在不同的机架中)。
CRUSH根据cluster map, rule和pgid算出x到一组OSD集合(OSD是对象存储设备):
(osd0, osd1, osd2 … osdn) = CRUSH(cluster, rule, pgid)
CRUSH算法计算出PG中主和次OSD的ID[24, 3, 12],其中24为primary,3,12为replica
Cluster map结构
Cluster map由device和bucket组成,它们都有id和权重值。Bucket可以包含任意数量item。item可以都是的devices或者都是buckets。
管理员控制存储设备的权重。权重和存储设备的容量有关。Bucket的权重被定义为它所包含所有item的权重之和。
结构图如下:

- Ceph使用树型层级结构描述OSD的空间位置以及权重(同磁盘容量相关)大小。
- 如上图所示,层级结构描述了OSD所在主机、主机所在机架以及机架所在机房等空间位置。
- 这些空间位置隐含了故障区域,例如使用不同电源的不同的机架属于不同的故障域。
- CRUSH能够依据一定的规则将副本放置在不同的故障域。
- OSD节点在层级结构中也被称为Device,它位于层级结构的叶子节点,所有非叶子节点称为Bucket。
- Bucket拥有不同的类型,如上图所示,所有机架的类型为Rack,所有主机的类型为Host。
- 使用者还可以自己定义Bucket的类型。
- Device节点的权重代表存储节点的性能,磁盘容量是影响权重大小的重要参数。Bucket节点的权重是其子节点的权重之和
参考资料
- shanno吳:Ceph剖析
- 陈小跑:CRUSH算法
-
感谢以上作者的无私分享